Our focus is to employ machine vision’s power to address the limitations of traditional health technologies and present innovative alternatives. Our innovation started with implementing an eight-camera bundle to a manual wheelchair and converting this manual wheelchair into an autonomous wheelchair. We have tested different technologies and reported the findings in multiple conference articles. The initial design of the octascopic wheelchair was selected as the best project by the audience’s vote in Clarkson’s Presidential Challenge, 2021. Our current research is to enable single sensor-based automatic hands-free navigation, real-time detection of on-path obstacles from octascopic images for collision-free navigation, accurate positioning of the wheelchair’s current location and destination to create an optimal path, ultra-low-power control to ensure high-performance within a limited resource or power budget. The rationale behind considering wheelchair navigation as our first project and offering an AI-based solution is that more than 1 billion people live with some form of physical disability and live substandard lives because of their loss of independence. Our research aims to provide their autonomy back by finalizing the design of a fully automated multisensory wheelchair with advanced features within a limited budget. Prof Charlie Robinson reviewed the initial designs, predicted the commercialization opportunity, and commented on its alignment with the theme of CREST, Clarkson’s multidisciplinary research and educational initiative aiming to design and develop augmentation or replacement devices or strategies.

Employing a synergy of machine vision, sensors, and embedded computing, we also presented another assistive technology, a vision-controlled novel prosthetic hand featuring: a) wrist micro camera-based artificial sensing to support a wide range of hand-based activities, b) on-board real-time detection of objects with distance approximation for accurate grasping, c) ultra-low-power control to ensure high performance. This research is significant as each year in the US, around 2,250 babies are born with limb differences. About 1,500 of these occur in the upper limbs. Upper limb amputation also occurs for injuries and accidents in workplaces. By the year 2050, according to the estimation of WHO, the number of people estimated to be living with the loss of an upper limb is 3.6 million. Since the use of the upper extremities is essential for communication and the performance of day-to-day activities, we are developing novel assistive devices to aid impaired individuals. We are working closely with Prof Charlie Robinson and Prof Kevin Fite to reach the necessities of those amputees. Our prosthetic hand won the second prize in 2022’s presidential challenge and was voted favorite in several categories. This project also won the second prize in the 2022’s Clarkson Technology Showcase as the ‘promising tech’ for future commercialization.

Each year, more than two thousand patients in the United States are diagnosed with upper limb impairments and motor neuron diseases.
For those patients, simple tasks and movements, such as opening or closing their hands, might be challenging. We have designed a new vision-controlled exoskeleton hand that will control the mechanical components to support a person’s hand open-closeness. Our orthotic hand is thin enough to be comfortable and practical for the user while still strong enough to aid the patient. It uses strong wires attached to a servo motor to perform extension and flexion. We are working with a research group at Worcester Polytechnic Institute (WPI) and involving disabled individuals to evaluate our device for medical use.
Lab Publications:
J4. Kwadwo O Appiah-Kubi, Evan Laing, Masudul H Imtiaz, A Study Protocol to Evaluate the Effects of Vestibular Training on Postural Control of Healthy Adults using Virtual Reality. Accepted in Applied Science, MDPI.
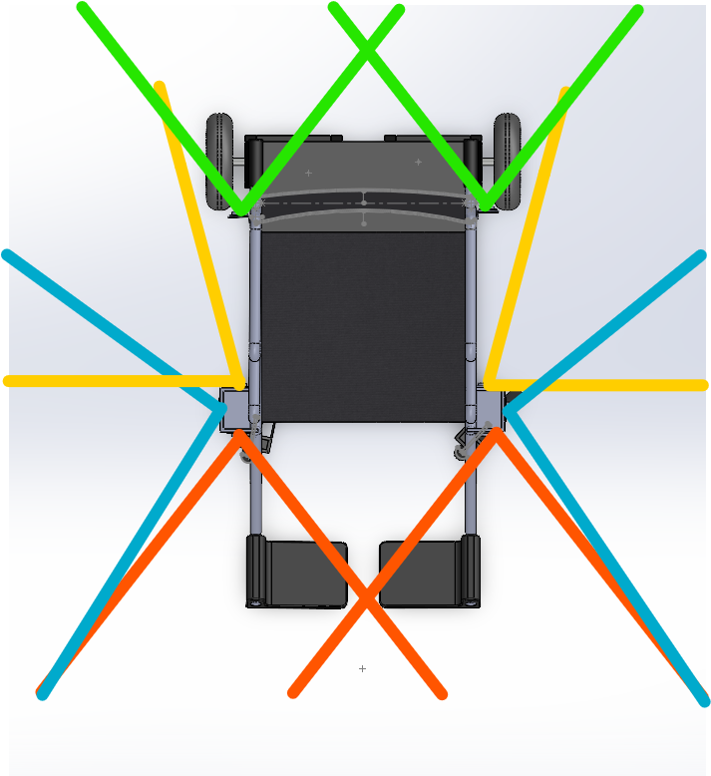
C13. M A Baset Sarker, Ernesto S Sola, Masudul Imtiaz, Adding cameras to wheelchairs to provide octascopic vision, Measurement, Sensor Systems, and Applications Conference (MEAS) 2022.
C11. M. A. Baset Sarker, Juan Pablo Sola, Aaron Jones, Evan Laing, Ernesto S Sola, and Masudul H. Imtiaz, Vision Controlled Sensorized Prosthetic Hand, Interdisciplinary Conference on Mechanics, Computers and Electrics (ICMECE) 2022.
C10. Connor Blais, Md Abdul Baset Sarker, Richard Lin, Masudul Imtiaz. A BLE-enabled sensor system for a head-controlled powered wheelchair, 9th International Electronic Conference on Sensors and Applications, 2022 (Abstract Accepted).
C9. Michaela Richey, Juan Pablo Sola, Evan Laing, Md Abdul Baset Sarker, Masudul Imtiaz, A Preliminary Design Of Hand Exoskeleton With An AI Camera, Measurement, Sensor Systems, and Applications Conference (MEAS) 2022.
C5. Garrett Stoyell, Anthony Seybolt, Thomas Griebel, Siddesh Sood, Md Abdul Baset Sarker, Abul Khondker, Masudul Imtiaz. The Mind-Controlled Wheelchair. 2022 ASEE St. Lawrence Section Annual Conference.
C4. Juan Pablo Sola, Ernesto S Sola, and Masudul H. Imtiaz. Designing my first prosthetic hand as a freshman student. 2022 ASEE St. Lawrence Section Annual Conference.
C3 E. Ketola, C. Lloyd, D Shuhart, J. Schmidt, R. Morenz, A. Khondker, M. Imtiaz. Lessons Learned From the Initial Development of a Brain Controlled Assistive Device, IEEE CCWC, 2022.
C1 E. Sola-Thomas, M. A. Baser Sarker, M. V. Caracciolo, O. Casciotti, C. D. Lloyd and M. H. Imtiaz, Design of a Low-Cost, Lightweight Smart Wheelchair, 2021 IEEE Microelectronics Design Test Symposium (MDTS), 2021, pp. 1-7.